9.4.2015-  - Nový článek o GPS trackeru. Vyhledávám, vyhledáváš, vyhledáváme...
- Nový článek o GPS trackeru. Vyhledávám, vyhledáváš, vyhledáváme...
22.3.2015- Nové videjko + v přípravě článek o gimbalu / stabilizaci kamery
1.2.2014- Recenze rámů Hobbyking X550 a X666 od Elkory.
30.10.2013- Trochu předělán FAQ.
11.10.2013 - Nový návod na stavbu alternativního rámu TBS Discovery.
24.7.2013 - FPV videjko z hradiště Zámka z Prahy. Pracuji na odstranění vibrací.
20.7.2013 - Nový článek o přeprogramování G-OSD pro zobrazení HOME ARROW.
19.7.2013 - FPV videjko z Libčice nad Vltavou.
13.7.2013 - Nový článek o FPV. FPV podruhé a lépe.
11.7.2013 - Přibyl seznam řídicích desek. Autor Elkora mi bude posílat aktualizované verze seznamu na doplnění.
10.7.2013- Další HD FPV video z Bořanovic.
9.7.2013- Nové FPV video.
5.7.2013 - Menší redesign.
16.5.2013 - Návod na vyvážení vrtulí
16.5.2013 Přidán alternativní návod na výrobu rámu od uživatele Elkora Rám se neosvědčil, Elkora bude nadále referovat o svých zkušenostech.
20.3.2013 - Přidán FAQ pro začátečníky.
1.3.2013 - Přidán TIP na lepší připevnění motoru v článku o stavbě rámu.
23.2.2013 - Přidána videa. Cizí neštěstí určitě nejvíce pobaví.
16.1.2013 - Znovu aktualizován článek o vyvážení. Nyní je stroj pěkně stabilní a můžeme se věnovat FPV :-)
11.1.2013 - Návod na výměnu ohlé osy motoru.
6.1.2013 - Aktualizován článek o FPV.
3.1.2013 - Aktualizován článek o vyvážení a přidáno video
3.1.2013 - Vítejte v Novém roce. Byl přidán návod na možnou opravu nabíječky/balancéru iMAX B6. V budoucnu přibude povídání o co možná nejlepší stabilizaci multikoptéry s Multiwii.
13.12.2012 - Přidána nová sekce Videa vašich multikoptér. Uveřejněte zde své video multikoptéry nahrané na Youtube. Stačí mi poslat odkaz.
25.11.2012 - Forum rozšířeno. Přidáno video.
11.10.2012 - Článek o FPV aktualizován.
22.9.2012 - Nový článek o FPV. Článek bude doplňován postupně.
11.9.2012 - Nová kamerka na trhu (,,více v rozpis a objednání součástek"
6.9.2012 - Přidána videa
31.8.2012 - Vyřešeny nožičky (,,stavba rámu")
30.8.2012 - Práce na článku ,,konfigurace a první vzlet" pokračují a budu zde neustále přidávat postupy
29.8.2012 - Přidáno video
Stavba quadrokoptéry – část 5. – vyvážení
Protože první let (a nejen ten můj) byl dosti nestabilní, je potřeba celý stroj řádně vyvážit. Není myšleno tedy těžiště, ale spíše vše co se týký motorů – křídla, unašeče. Ty totiž způsobují interference s čidly na desce Multiwii. Jak je vidět na předchozím videu z mého prvního letu, quadrocopter je zejména při startu (pomalých otáčkách) v nesnázích a zvedá se třeba jen jedna strana. To je ale secsakramensky špatně, protože potřebujeme stabilní let. Ukážeme si tedy na některé možné chyby.
Zde můžete vidět problém s vibracemi. Video je od Johnyho. Takovýto problém je třeba odstranit. Video je pořízené za připojení k PC a s upevněnými vrtulemi.
Jedním z řešení je zahodit dodávané unašeče, které jsme dostali k motorům a pořídit unašeče MP JET. Jsou mnohem vyváženější.

Dále můžeme zkrátit osy motorů. Čím jsou osy kratší a vrtule jsou níže, tím spíše budou vibrace do celého stroje menší.
Dále není od věci v programu Arduino (používám verzi 023 i když jsou novější) zapnout filtr vibrací. Otevřeme si tedy program, dejte File/Open a zadejte soubor „config“ (najdete u programu Multiwii 1.9). Poté se vám otevře několik záložek, klikněte tedy na „config.h“. Nyní vyhledejte řetězec ,,//#define FFIMUv2 “ a odmažte mu ty 2 lomítka. Pokud znáte kod html či obdobný víte, že lomítka definují poznámku. Tedy kod je s lomítky přeskočen. Nyní jste zadefinovali desku Multiwii od Cirius. Pokud máte jinou, je třeba zadefinovat jinou řídicí desku.
Nyní v té samé záložce vyhledejte řetězec „//#define ITG3200_LPF_42HZ “ a proveďte to samé, tedy odmazání lomítek. Nyní byste měli mít aktivní filtr proti vibracím, tedy až dáte Save a následně Upload (nahrání souboru do desky).
V minulém článku jsme si u desky zkalibrovali akcelerometry. Nyní si ho v programu MultiwiiGUI (který jsme si už ukázali) můžeme zapnout. Let tak bude znatelně stabilnější. Krom toho se dá zapnout i magnetometr, či barometr (ALTHOLD), ovšem poslední zmiňovaný senzor (barometr) nedoporučuji, neb je (alespoň u mé verze) dosti …….. jak to jen slušně říci. Prostě nefunguje jak má. Možná, když uděláte desce Multiwii nějaký kryt, například od multipaku DVD, bude to lepší. On i magnetometr i když ho kalibrujete nefunguje zázračně, ale ten zapnout můžeme. Samozřejmě možná máte lepší verzi desky s novějšími senzory a toto neplatí už u vás.
Připojíme si tedy quadrokopter do PC a připojíme program tlačítkem Connect. Můžeme tedy v záložce RC Control Settings zaškrtnout políčka dle následující fotky.
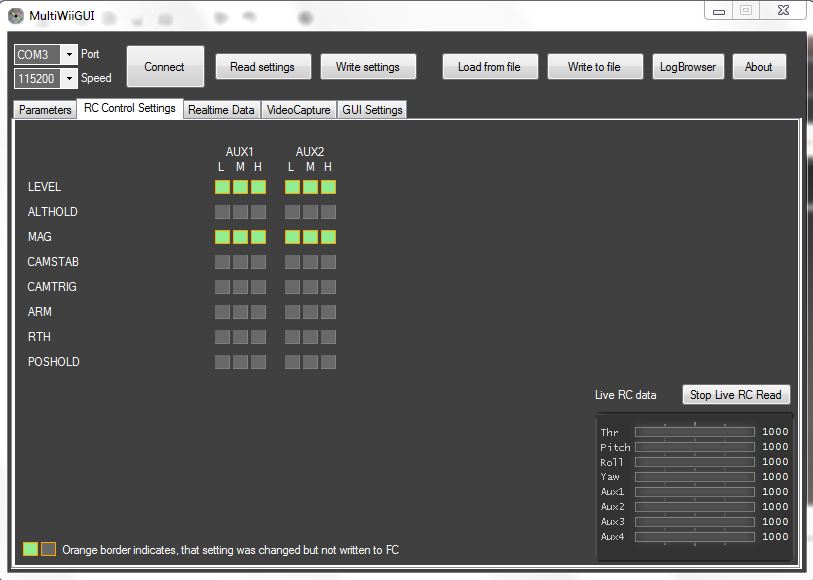
Je zase nutné dát poté Write settings. Nyní se dá létat prakticky v pokoji. Pozor ale na let někde výše. Naskytl se mi tu docela závažný problém, kdy se mi stroj několikrát už zřítil. Nejvážnější problém nastává, když ve výšce rychle uberu plyn na 0. Stroj se začíná propadat. To je v pořádku, ale má držet úhel pomocí gyroskopu, aby jste nad zemí mohli prudce přidat a stroj stabilizovat. Tomu se ale tak někdy neděje. Stroj se mi v důsledku toho právě neovladatelně zhroutil. Předejít tomu můžeme takto:
Kalibrace rozsahu plynu:
Po této kalibraci by se vám nemělo stávat, jako mne doposud, že pokud budete chtít pomalu vzlétnout, začne se vám zvedat třeba jen jedna strana motorů. Touto kalibrací nastavíte rozsah páčky plynu na vysílačce a tím budou všechny ESC vědět od kdy mají zabírat. Jak jsem psal výše, nemělo by se vám pak stát, že se quadrokopter ve výšce pomine, pokud prudce uberete a zárověň přidáte plyn. Nutné je mít ale správně kalibrovaný senzor akcelerometru.
- Takže vypojíme z říd. desky (Multiwii) kabel vedoucí z ESC (třížilový) a připojíme ho přímo na kanál přijímače, kterým ovládáte plyn (u mne pozice 2).
- u vysílačky dáme plný plyn a zapneme ji (nebojte motor se nezačne točit, motory máte zamknuté)
- připojíme baterku do quadrokoptéry
- až 2x zapípá je hotovo (zvuk se může lišit v závislosti na výrobci
- páčku plynu stáhneme na nulu (zas zapípá)
- baterku odpojíme a provedeme to samé s ostatními motory
Neméně důležité je nastavit programovací kartou ESC. Já objednal tuto z RCTimer.com. Jedná se o nastavení chování ESC při vybité baterii a jiné fičury.

Ony parametry se dají nastavit i bez ní. Je to ovšem velmi nepohodlné – tedy pomocí zvuku-pípání z ESC a vysílače. Karta stojí 10$. Zapojení je snad jasné. Stačí vypojit z řídicí desky (Multiwii) třížilový ESC konektor a zapojit ho do oné programovací karty(pozor na barvy). Napájena je sice 4,8-6V, ale ESC tento konektor sám napájí 5V. Poté ještě připojte baterku do quadrokoptéry. Tím bude ESC napájeno 11,1V a to pak bude napájet samotnou programovací kartu 5V. Pozor jen musíte dát na to, abyste do karty samotné nazapojili přímo 3S baterii.
Po připojení můžeme nastavit rychlou odezvu ESC a také baterii na Ni-xx (tedy nikoliv Li-xx jak by jste si asi mysleli) Problém je v tom, že nyní pokud vám dojde napětí v baterii pod určitou hranici, ESC toto napětí vyhodnotí a pokud ho shledá nízkým, z důvodů podbití baterie odstřihne motory. To je ale ve výšce špatně. Je lepší si podvybít na chvíli baterii, nežli přijít o stroj. Proto je třeba nastavit baterii na Ni-xx. Můžete použít toto nastavení:

Samozřejmě stejné parametry nastavíme u všech ESC obdobným způsobem.

Napsat komentář
Pro přidávání komentářů se musíte nejdříve přihlásit.